RV360 Semiesférica a equirrectangular¶
Descripción
This effect/filter converts a video frame with two hemispherical images to a single equirectangular frame.
The plugin assumes that both hemispheres are in the frame. If you have a camera like the Garmin Virb360 that produces two videos, one from each camera, you should start by converting them to a single movie by placing them side by side using, for example, ffmpeg (you can also add parameters to produce lossless, intra-only output here for easier editing):
ffmpeg \
-i left.mp4 \
-i right.mp4 \
-filter_complex hstack \
output.mp4
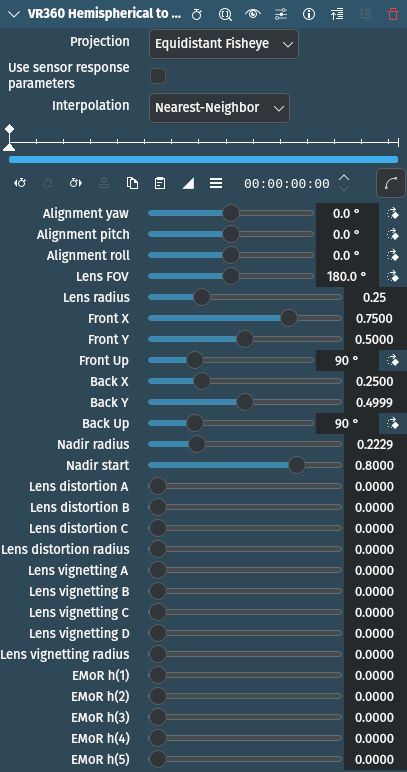
Parámetros
Parámetro |
Valor |
Descripción |
|---|---|---|
Proyección |
Selección |
The fisheye projection type. Currently only equidistant fisheyes, like the Ricoh Theta and Garmin Virb360 are supported. |
Usar parámetros de respuesta de sensor |
Interruptor |
Switch on to use sensor response parameters (see EMoR h(x) parameters below) |
Interpolación |
Selección |
Determines the sampling method |
Alineación alabeo / cabeceo / guiñada |
Entero |
Adjust the rotation along the Z- (yaw), X- (pitch) and Y-axis (roll) to compensate for any alignment differences |
Campo de visión de la lente |
Entero |
Field of View of a single hemisphere in degrees |
Radio de la lente |
Decimal |
Radius of the image circle as a fraction of the frame width (for example 0.25 = 25% of 1920) |
Frontal X / Y |
Decimal |
Defines the center of the image of the front-facing camera. X is expressed as a fraction of the image width, Y as a fraction of the image height. |
Frontal arriba |
Entero |
Defines the «up» direction in the image in degrees counting clockwise from a directions towards the top edge |
Trasera X / Y |
Decimal |
Defines the center of the image of the back-facing camera. X is expressed as a fraction of the image width, Y as a fraction of the image height. |
Trasera arriba |
Entero |
Defines the «up» direction in the image in degrees counting clockwise from a directions towards the top edge |
Nadir radio / inicio |
Decimal |
Adjust the nadir of the camera if you have parts of the camera or equipment in the image |
Distorsión de lente A / B / C |
Decimal |
Lens distortion correction parameters. The first three parameters are the same as in Hugin. |
Radio distorsión lente |
Decimal |
Lens distortion correction parameters. If you use Hugin parameters, the Radius should be set to the value of (0.5 * min(image width, image height) / image width). For a 2:1 aspect dual hemispherical image, that would be 0.25. |
Viñeta de lente A / B / C / D |
Decimal |
Lens vignetting correction parameters. The first four parameters are the same as in Hugin, corresponding to the Va , Vb , Vc , and Vd image parameters. |
Radio viñeta de lente |
Decimal |
If you use Hugin parameters, the radius should be set to the value of (0.5 * image diagonal / image width). For a 2:1 aspect dual hemispherical image, that would be 0.5590. Use the A parameter to scale the effect and avoid overexposing highlights. |
EMoR h(1 / 2 / 3 / 4 / 5) |
Decimal |
Sensor response parameters. The EMoR h(x) parameters are the same as Hugin”s Ra - Re in the lens parameters. If you use Hugin-derived values for vignetting correction, you should also use these parameters, as Hugin”s vignetting correction assumes that the sensor response has been corrected. |
Los siguientes elementos se encuentran disponibles para ser seleccionados:
Proyección
Ojo de pez equidistante |
Predeterminado |
Interpolación
Más cercano |
Predeterminado |
Bilineal |